
Download a (unofficial) uOttawa LaTeX thesis template
you can donate your spare computer time: pick the project(s) that you like
I am a member of Heterodox Academy | To improve the quality of research and education in universities by increasing viewpoint diversity, mutual understanding, and constructive disagreement
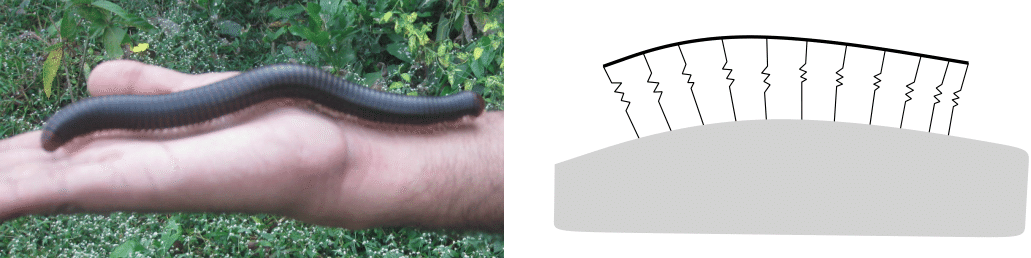
Left: Giant millipede (longer than 20 cm) from south bank of river Periyar near Kodanadu. (By Irvin calicut (Own work) [CC-BY-SA-3.0 (http://creativecommons.org/licenses/by-sa/3.0)], via Wikimedia Commons.) Right: modeling as beam on elastic foundation.
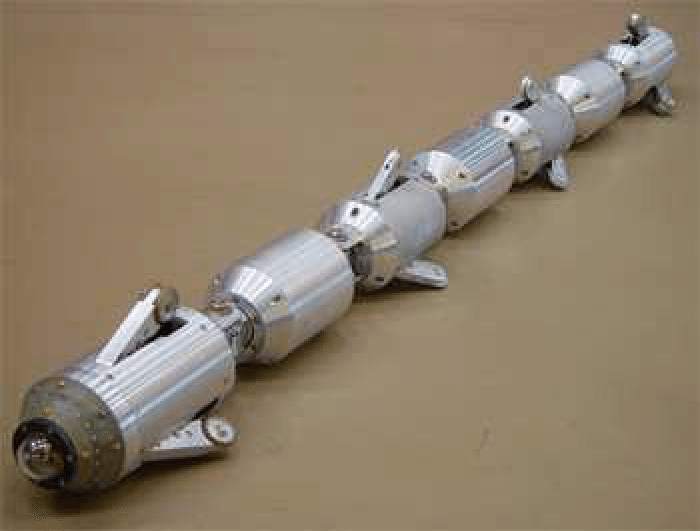
The robot Explorer II (source: http://www.rec.ri.cmu.edu/projects/explorer/).
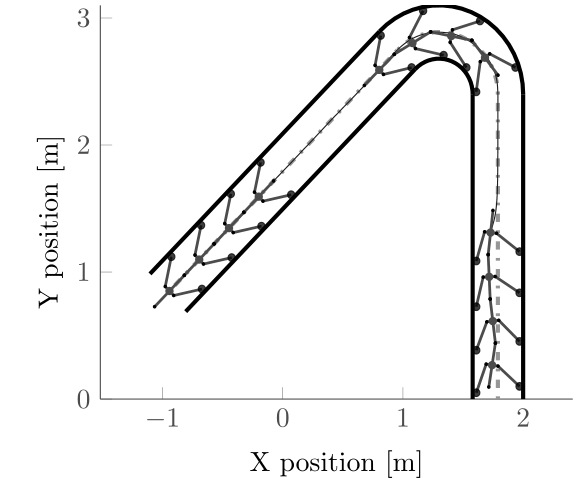
Simulation of a the closed loop dynamics across a pipeline elbow.
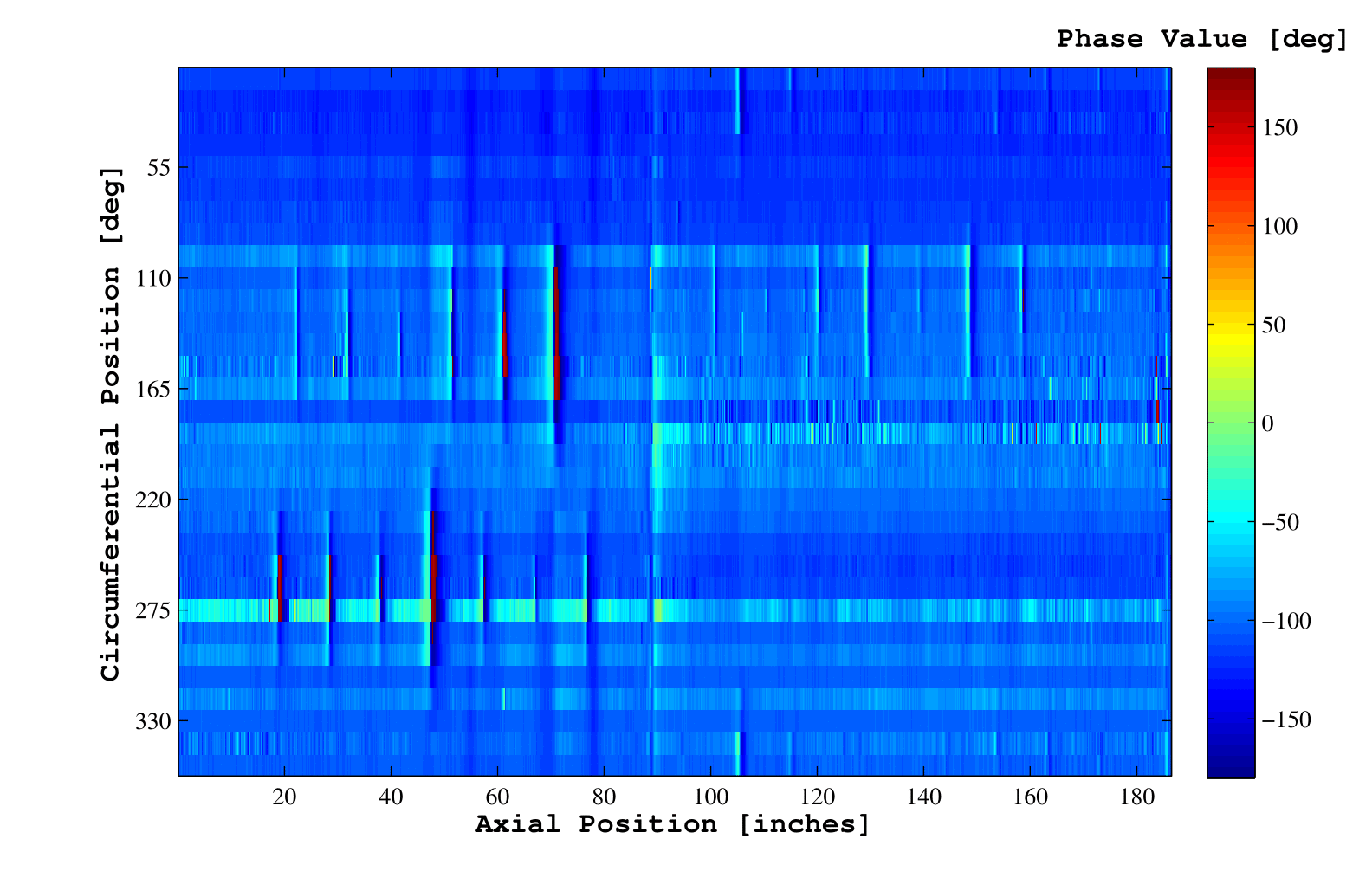
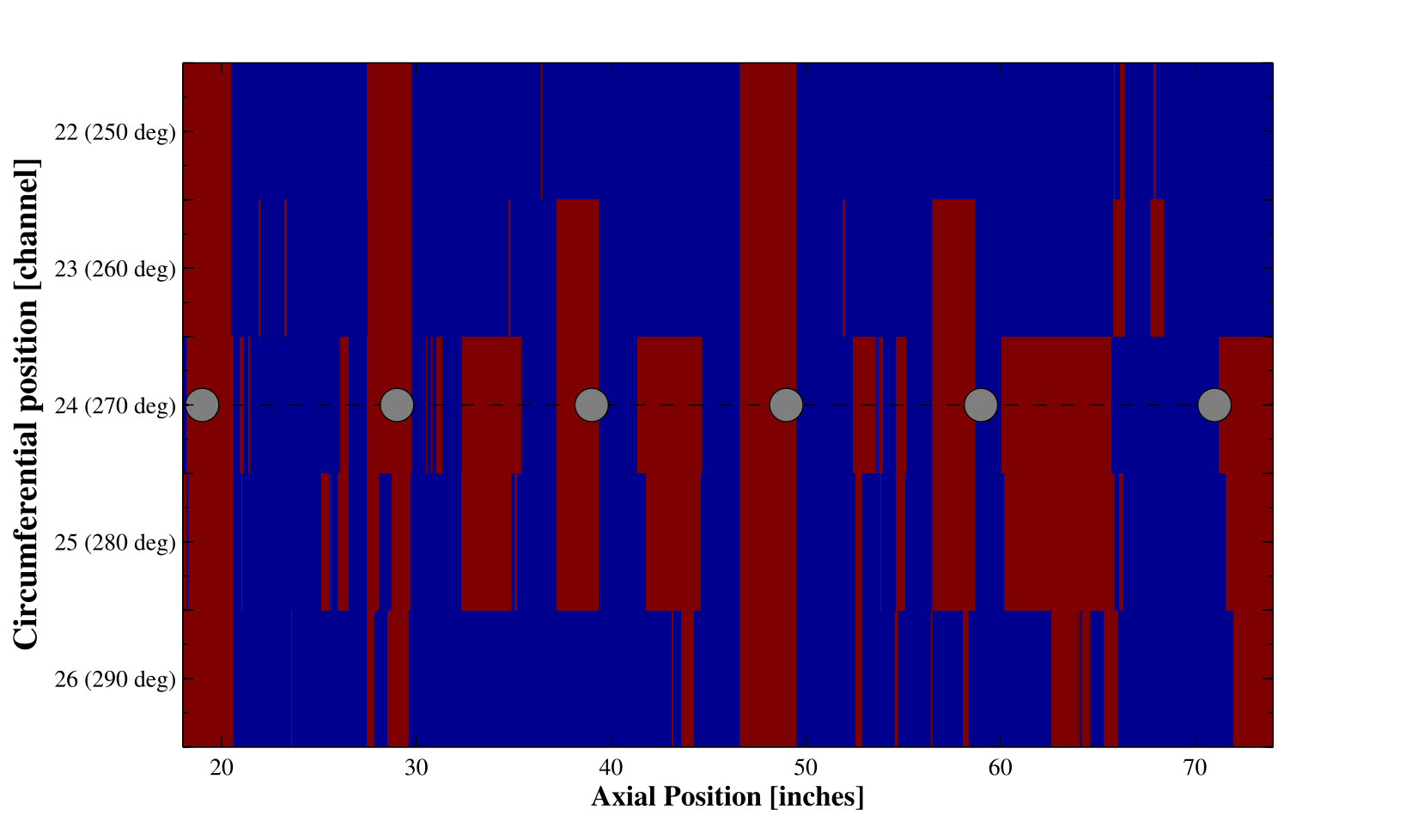
Raw sensory data (Figure published in Sheiki F., Spinello D. and Gueaieb W., 2015).
Data mapped into an information entropy space to detect critical regions (Figure published in Sheiki F., Spinello D. and Gueaieb W., 2015).
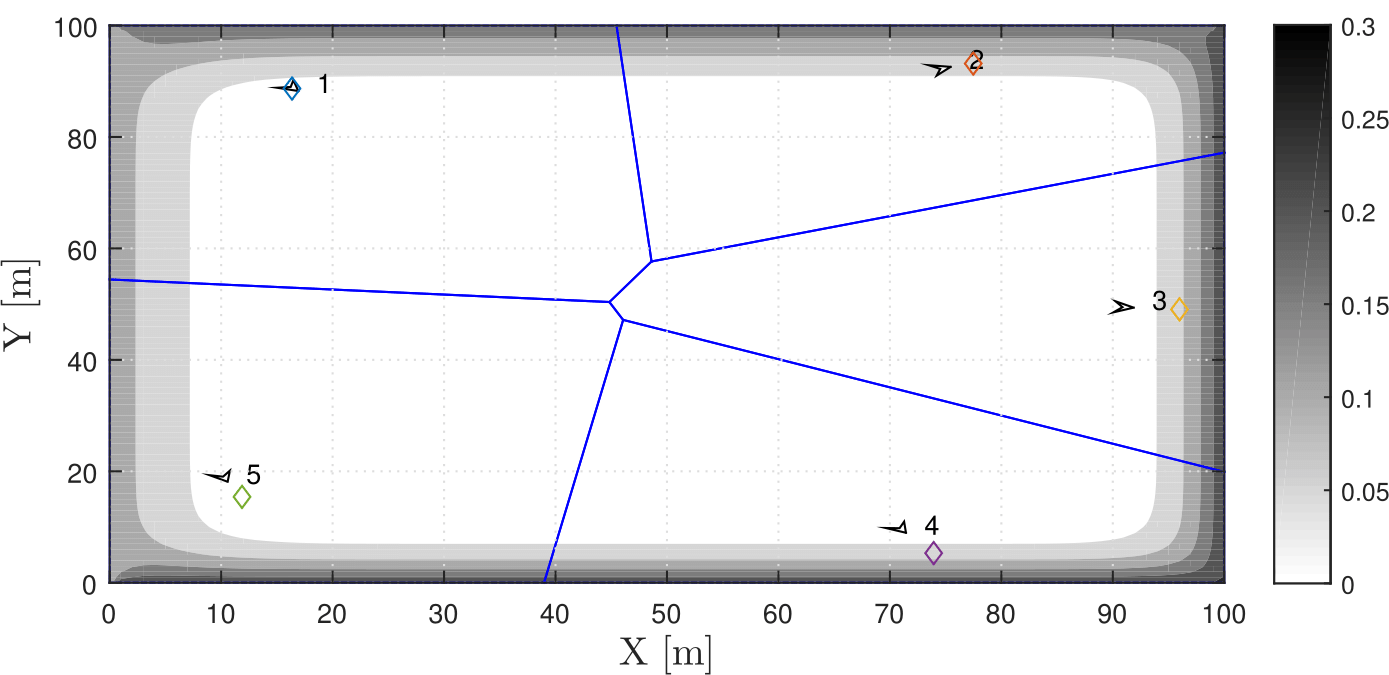
Simulated multi-agent system configuration in an area coverage mission with diffusive risk density. Agents track centroids of generalized Voronoi cells.
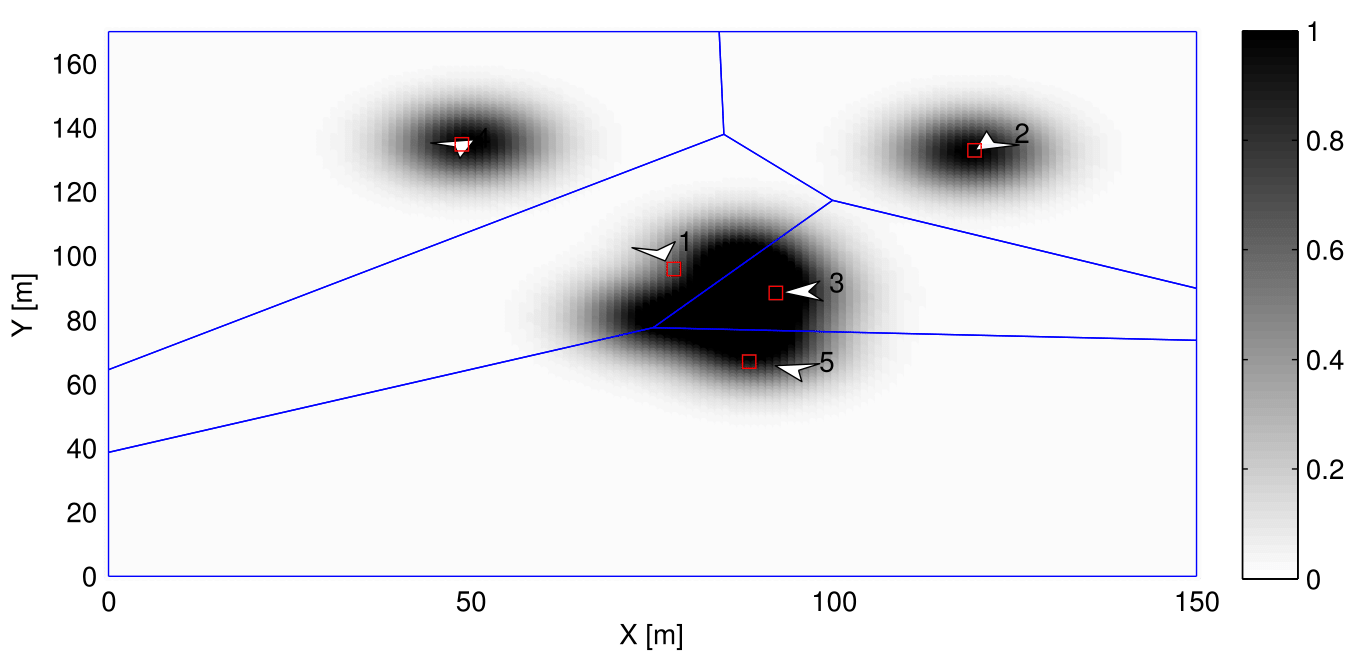
Simulated multi-agent system configuration in an area coverage mission with risk density locally perturbed by moving threats in the perimeter. Agents track centroids of generalized Voronoi cells.
Simulated cooperative target (black dot) state estimation by three mobile sensors with occasional communication. Trajectories generated by the motion control algorithm emerge from the minimization of the uncertainty associated to the estimate of the target state.
Scalar measure of the uncertainties associated to the target state estimates. Information sharing and structure of the underline communication network determine the convergence to a common value.
Lumped model to illustrate the pull-in phenomenon.
Bifurcation diagram of the lumped mass-spring system
Traveling stress wave associated with a sinusoidal load of finite duration applied at the free end (left) of the cantilever. The interface is located in correspondence of the red dot
Displacement of a bimaterial cantilever associated with a sinusoidal load of finite duration applied at the free end (left). The line at the bottom represents the initial length with interface located in correspondence of the red dot
Space distribution of the shear stress in a block of elastothermoviscoplastic material in a simple shear test: an elastic unloading wave emanates from the specimen center after the shear band formation, revealed by the sudden drop of the shear at the center
Time history of the shear stress at the center of a elastothermoviscoplastic material specimen in a simple shear test: the sudden drop corresponds to the shear band initiation and formation